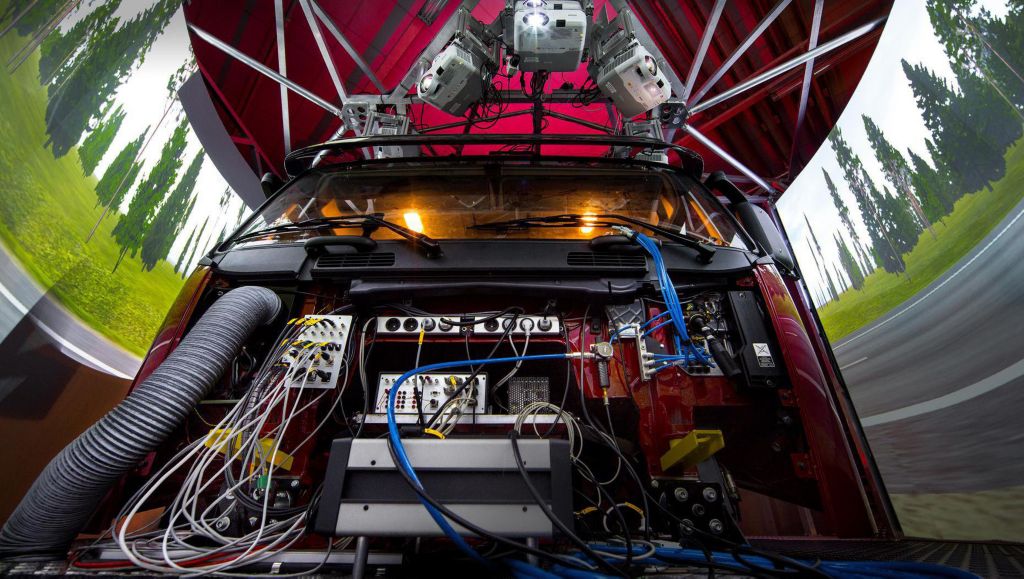
Hij zit in de controlekamer, waar computers vastleggen hoe de testrijders rijden, kijken en hun positie op de weg bepalen. Enorme hoeveelheden informatie worden verzameld. Een van de belangrijkste voordelen van deze rijsimulator, die een betrekkelijk nieuwe testmethode vormt, is dat het nu mogelijk is de chauffeur in een vroegtijdig stadium te betrekken bij het ontwikkelen van nieuwe producten.
“Voorheen was het noodzakelijk om alles eerst te bouwen: wegen, voertuigen en veiligheidssystemen, voordat tests konden worden uitgevoerd om te zien of het in de praktijk werkt. Nu is het echter mogelijk om dit parallel te doen”, legt Kristoffer Tagesson uit.
De rijsimulator maakt het met andere woorden mogelijk om nieuwe voertuigen te testen in rijomgevingen van de toekomst en om dat nu al te doen. Peter Nilsson, ook industrieel promovendus bij Volvo Trucks, is betrokken bij precies zo´n soort project.
“Het werk aan het voertuig en de infrastructurele ontwikkeling richt zich op de lange termijn. Met deze simulator, die in principe elke wegomgeving kan visualiseren, kunnen we deze ontwikkelingen combineren”, zegt hij.
Het project van Peter Nilsson heet Safe Corridors en doet onderzoek naar veilige rijbanen (safe corridors) voor lange voertuigcombinaties van tussen de 27 en 34 meter.
“Ik ben ervan overtuigd dat we tegen 2020-2030 deze lange voertuigcombinaties op de weg hebben, aangezien ze een efficiënt en milieuvriendelijk alternatief vormen. Dan moeten we echter een manier vinden om het rijden voor de chauffeur te vergemakkelijken. Het is een uitdaging om de exacte positie van de trailer te weten”, aldus Peter Nilsson.